Software
 .
.Schnelle Richtungsänderungen lassen sich eigentlich nur mit je einem
Motorantrieb pro Rad erreichen. Bezüglich Geschwindigkeit und Fahr-
genauigkeit ist m.E. das links gezeigte Rad das geeignetste
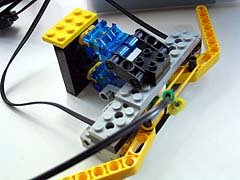
Fahrzeugbasis
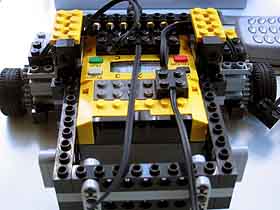
 Dies ist eine mögliche Basis mit 2
Antrieben. Durch drehen des RCX
Dies ist eine mögliche Basis mit 2
Antrieben. Durch drehen des RCXum 180° wäre der IR S/E nicht innerhalb des Rahmens, dafür ist der
Anschluss für den 9V Netzteil nicht so günstig.
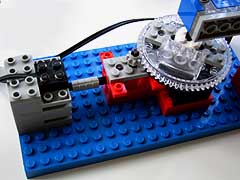
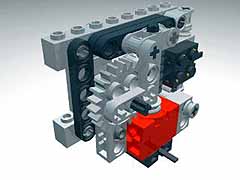
Winkelgetriebe und ein Drehsensor, der über die Winkelsteuerung von
6° den Motor im Sekundentakt aktiviert.
Berührungskontakte
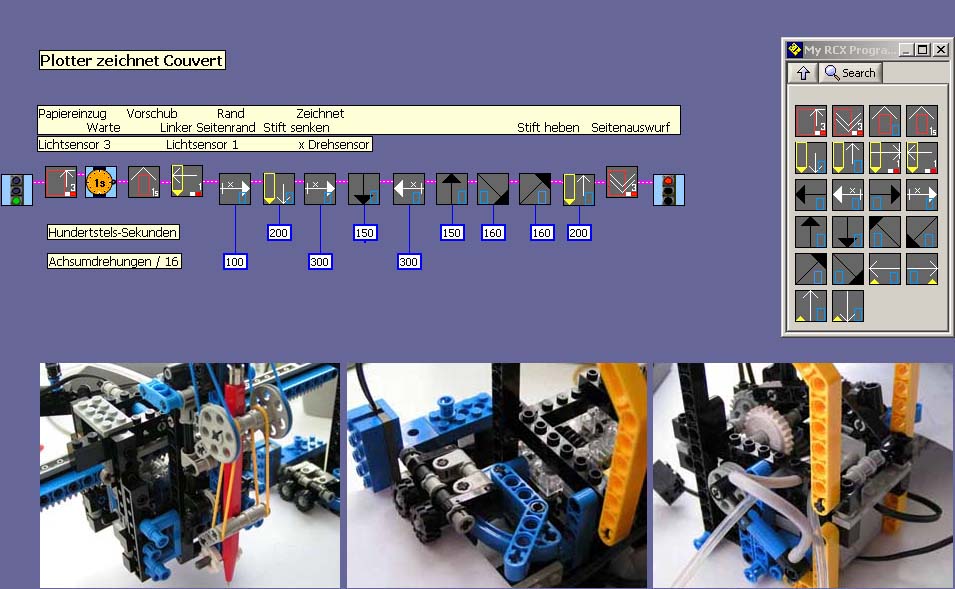
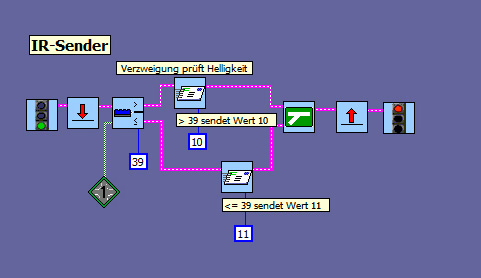
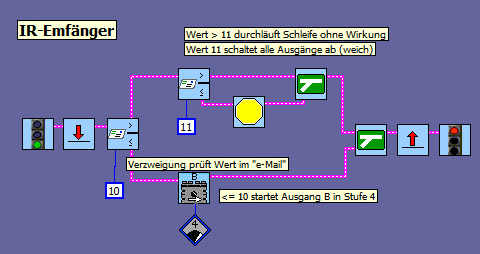
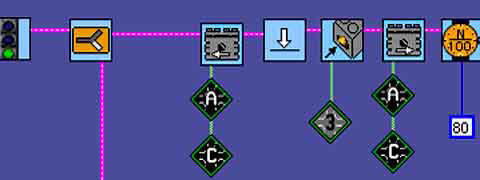
Die Steuerung erfolgt in Endlosschleifen die in 2 separaten Task's
paralell ablaufen.
In jedem vi-Programm sind mehrere Task's möglich, über Abzweigungen
und jeder mit eigenem Ende.

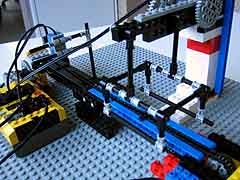
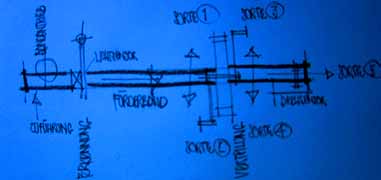
Lichtsensor über Förderband soll Teile an ihren Helligkeitsunterschieden
erkennen, und Transport sowie den Abwerfer auf Grund dieser Werte
steuern. Möglich wären 5 verschiedene Teile. Schwierigkeit: Farben haben
nur sehr geringe Unterschiede in der Helligkeit.Der mechanische Teil läuft jetzt.
Verwendet: 2 Motoren, Lichtsensor, Drehsensor und 1 Förderkette. Die
Programmierung ist in Arbeit. Angestrebt wird eine kontinuierliche Sortierung
mit gleichmässigen Bandlauf ohne Halte.


Den Abwerferteil habe ich umgebaut. Die Förderkette ist nicht ideal für einen
exakten Transport zur richtigen Position. Die Bandsteuerung mit dem Dreh-
sensor will noch nicht so wie ich.