... meine ... projekte ... mit ...
c-control I ... c-control II ... c-control pro ... avr ... und ... pc ...
|
|
         
|
ein kleines Video "an der Linie zurückweichen" - das zweite kleine Video "einfache Linienverfolgung" auf YouTube
ein weiteres Video zur Demonstration der Fernsteuerung und des Roboterarmes auf YouTube
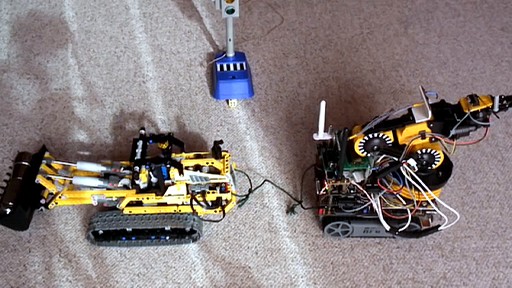
kein ernstgemeintes Kräftemessen zwischen dem RP6v2 und dem Lego Technik Raupenlader auf YouTube RP-K2 ist ein
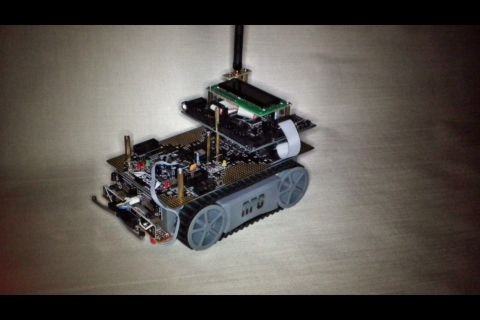
RP6v2 mit RP6v2 CONTROL M256 WiFi Erweiterungsmodul und
Experimentierplatine
Damit der RP-K2 diese Linie auch findet bekam er bereits einen Liniensensor, wie ihn der ProBot besitzt.
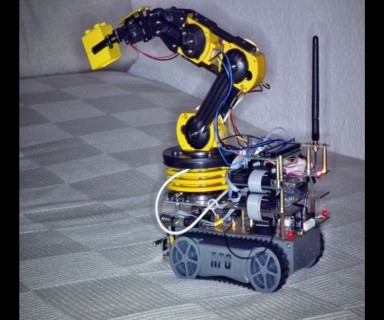
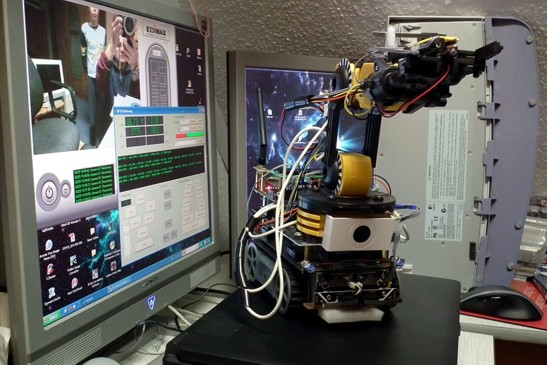
Zum Einsammeln der Steine soll er den umgebauten Velleman Roboterarm KSR10 erhalten (ganz oben). Ich entschied mich aus Kostengründen für diesen Arm, außerdem wollte ich auch noch ein wenig basteln. Auf dem Bild unten ist einer der drei bereits eingebauten Endcoder zu erkennen. Ob das taugt werde ich sehen. Die Auflösung ist sicher nicht ideal, soll aber für den Anfang reichen. Um zur Ladestation und zur Kiste für die Bausteine zu gelangen soll sich der Roboter dann an der schwarzen Linie orientieren. Da ich noch keine Idee für das Finden der Steine habe, wird das Ganze erst einmal per Fernsteuerung realisiert. Ideale Voraussetzung dafür ist das Beispielprogramm 12 WIFI REMONTE 2.
Ich hoffe bei euch im Netz weitere Ideen zu finden. So zu Beispiel der Anschluss einer Kamera für die Bildübertragung natürlich über WLAN und selbstverständlich für die Auswertung der Kamerabilder zum Finden der Bausteine. Das wäre toll. Über den Forschritt meiner Basteleien werde ich hier berichten.
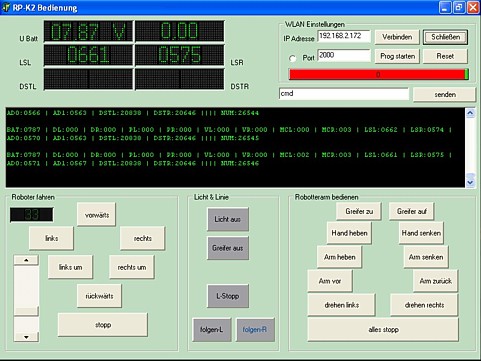
Das ist die Fernbedienungssoftware, erstellt mit Delphi 6. Angepasst für einen Touchscreen mit 800x600 Pixel.
Das Programm befindet sich in ständiger Veränderung, und ist nur für Demozwecke und zum Testen gedacht. Aber meinem 8 jährigem Sohn macht es viel Spaß. Ein erster Versuchsaufbau mit einer WLAN-Kamera.
Es funktionierte - ich konnte nach dem Kamerabild fahren - aber mehr nicht. Die Kamera muss also über den Greifer. Dann macht es Sinn. |